![]()
TP3 Thérémine sonore
Février 2017 Mooc France Université Numérique FUN. |
// Les vidéos et les codes de mes TP Arduino se trouvent sur mon site perso:
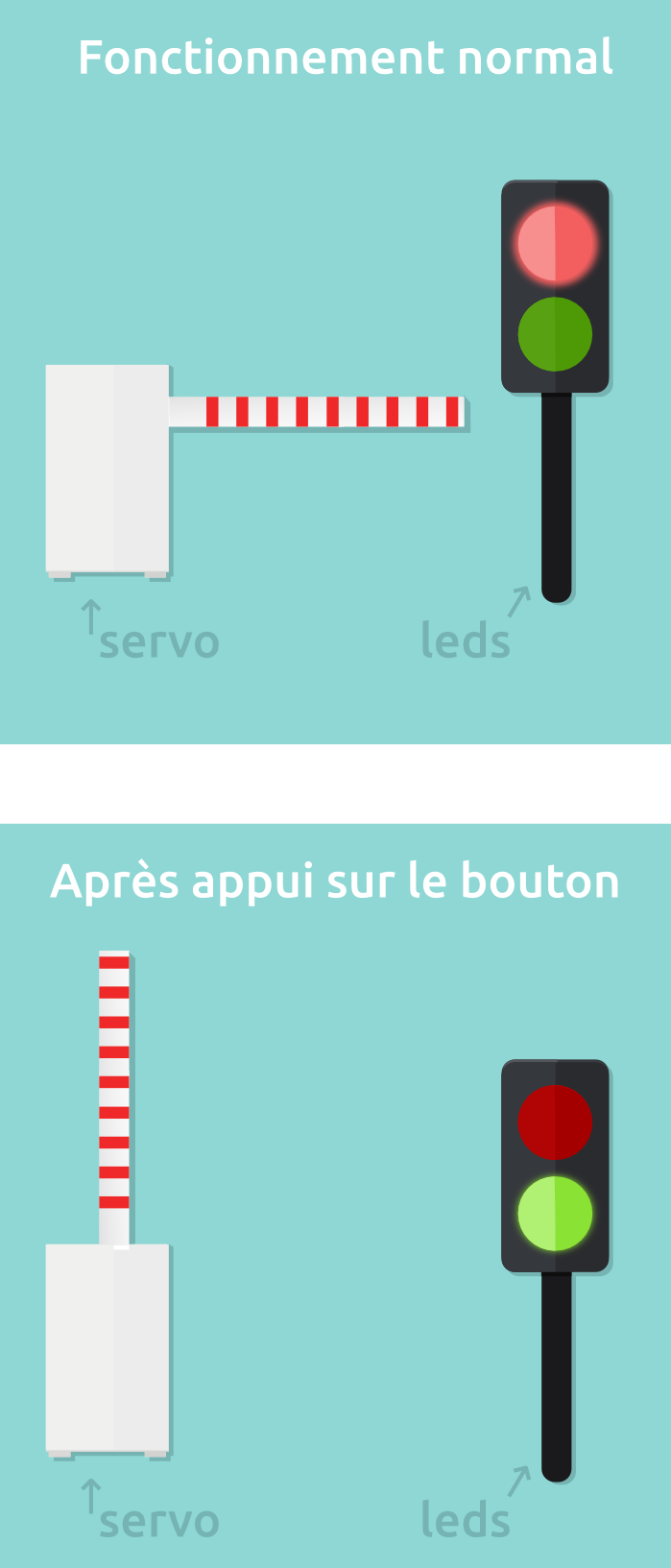
// http://uncledens.chez-alice.fr/arduino/index.htm // // Pour ce TP : https://youtu.be/zLJA9I9N2B4 #include <Servo.h> //Appel de la librairie "SERVO" Servo myservo; // Crée l'objet SERVO pour controler le SERVOMOTEUR int pos = 0; // variable qui enregistre la position du SERVO // définition des bornes d'entrée et sortie const int rouge = 3; //La led rouge est connectée à la PIN 3 const int verte = 4; //La led verte est connectée à la PIN 4 const int bouton = 2; //Le bouton est connecté à la PIN 2 const int servo = 9; //Le servo est connecté à la PIN 9 int etatbouton = 0; // Vérification de l'état du bouton void setup() { myservo.attach(servo); pinMode(rouge, OUTPUT); // Défintion des entrées/sorties pinMode(verte, OUTPUT); pinMode(bouton, INPUT); } void loop() { // On initialise dés le début l'état des led digitalWrite(rouge, HIGH); digitalWrite(verte, LOW); etatbouton = digitalRead(bouton); // Lit l'état du bouton poussoir if (etatbouton == HIGH) { // si bouton appuyé, alors on lève la barrière et on fait changer l'état des led, sinon, on reboucle for (pos = 0; pos <= 90; pos += 1) { // on commence à actionner dans un sens la barrière, jusqu'à 90°, degrè par degrè myservo.write(pos); // va à la position "POS" delay(15); // attends 15ms avant de changer la position de la barrière d'1 degrè } // la barrière est levée, on peut allumer la led verte et éteindre la rouge digitalWrite(verte, HIGH); digitalWrite(rouge, LOW); delay(5000); // Attends 5 secondes // La led rouge s'allume et on éteind la verte digitalWrite(rouge, HIGH); digitalWrite(verte, LOW); //On referme ensuite la barrière for (pos = 90; pos >= 0; pos -= 1) { // cette fois si, on passe de 90° à 0° (décroit à chaque fois de -1) myservo.write(pos); // va à la position "POS" delay(15); // attends 15ms avant de changer la position de la barrière d'1 degrè } } } |
![]()